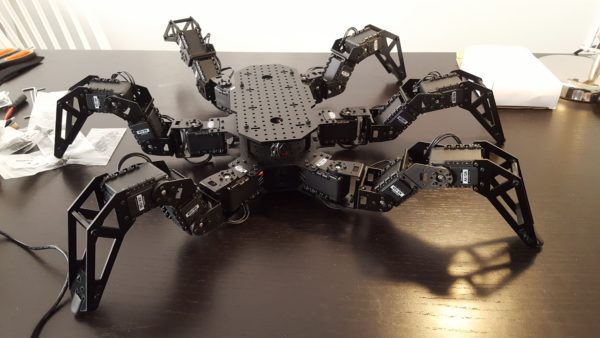
Just have a look at this awesome 8-legged robot spider in this Youtube movie by Adam Savage.
A robot spider with incredibly realistic movement. Adam shows off the special box and platform he built to tinker and calibrate the spider, and then sends it crawling around the pool table in his shop.
Science4Kids is initiated by Erik Peter Vermaat, a passionated educator. He is convinced that much more emphasis should be given to technology education. Especially to young people.
Kids from aged 7 to 14 attend in their free time several sessions ranging from electronics, virtual reality, physics, robotics and much more. In an easy and accessible way the kids get some feeling, hands-on experience and understanding of new technology, play with it and do some programming (and maybe in future join a TADhack).
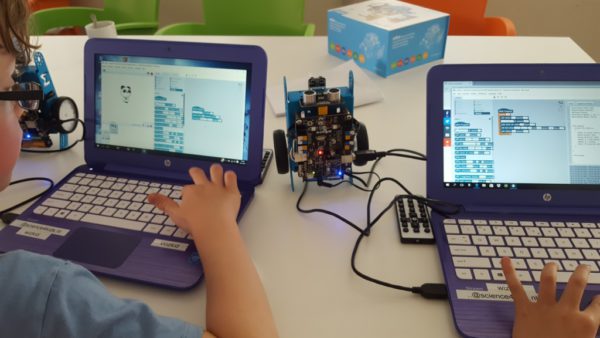
This afternoon the kids assembled the 2 wheels Mbot, programmed them and had fun driving them around trying to avoid roadblocks like chairs and spiders.
Mbot educational robot kitsKids hacking the robot
A totally different audience than a regular TADhack attendance but there is a certain resemblance. These kids too are very eager to learn about new and future technology.
Watch the impression below of this successfull afternoon.
One of the kids showed me this kangaroo robot. Our spider uses it 6 legs to crawl. But this creature just uses 2 legs to jump around. Amazing! Thanx for sharing, young man!
With many thanks to Science4Kids for presenting and demonstrating our Babelonio hack and spider to these “whizz kids”. It was a nice experience and to Erik Peter, continue with this excellent initiative!